A · IMAGE WARPING and MOSAICING
A1 · Shoot and Digitize Pictures
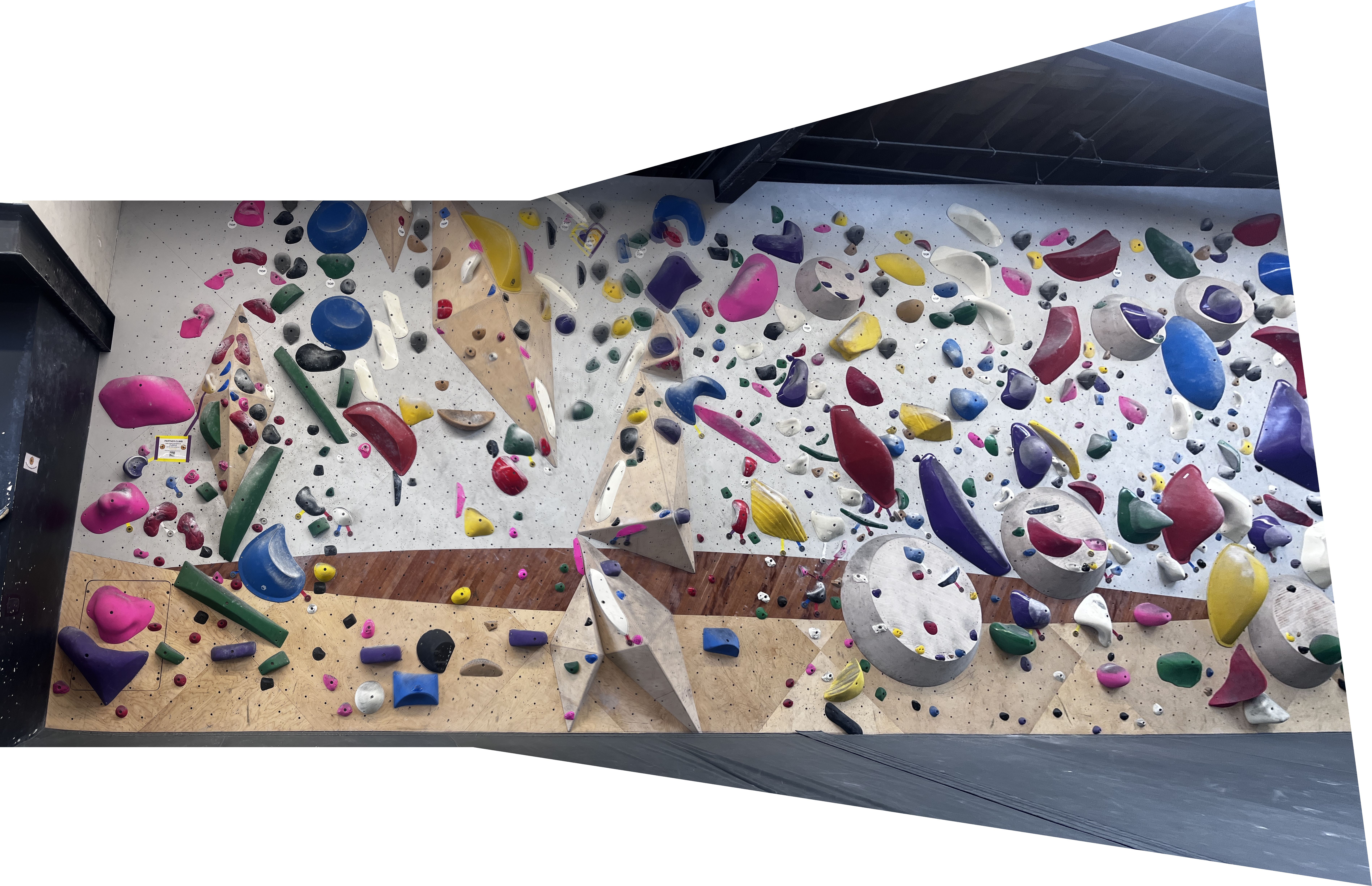
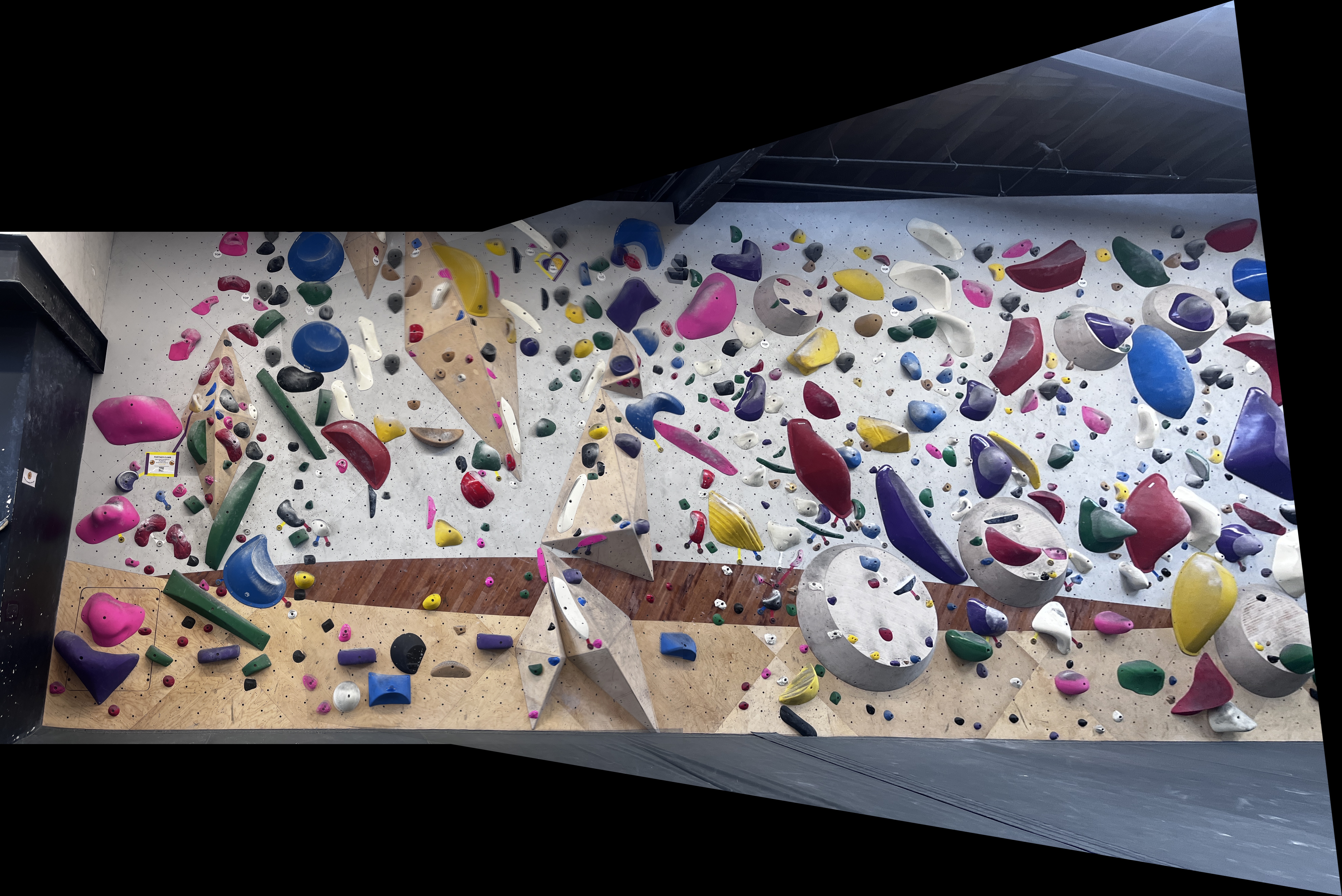
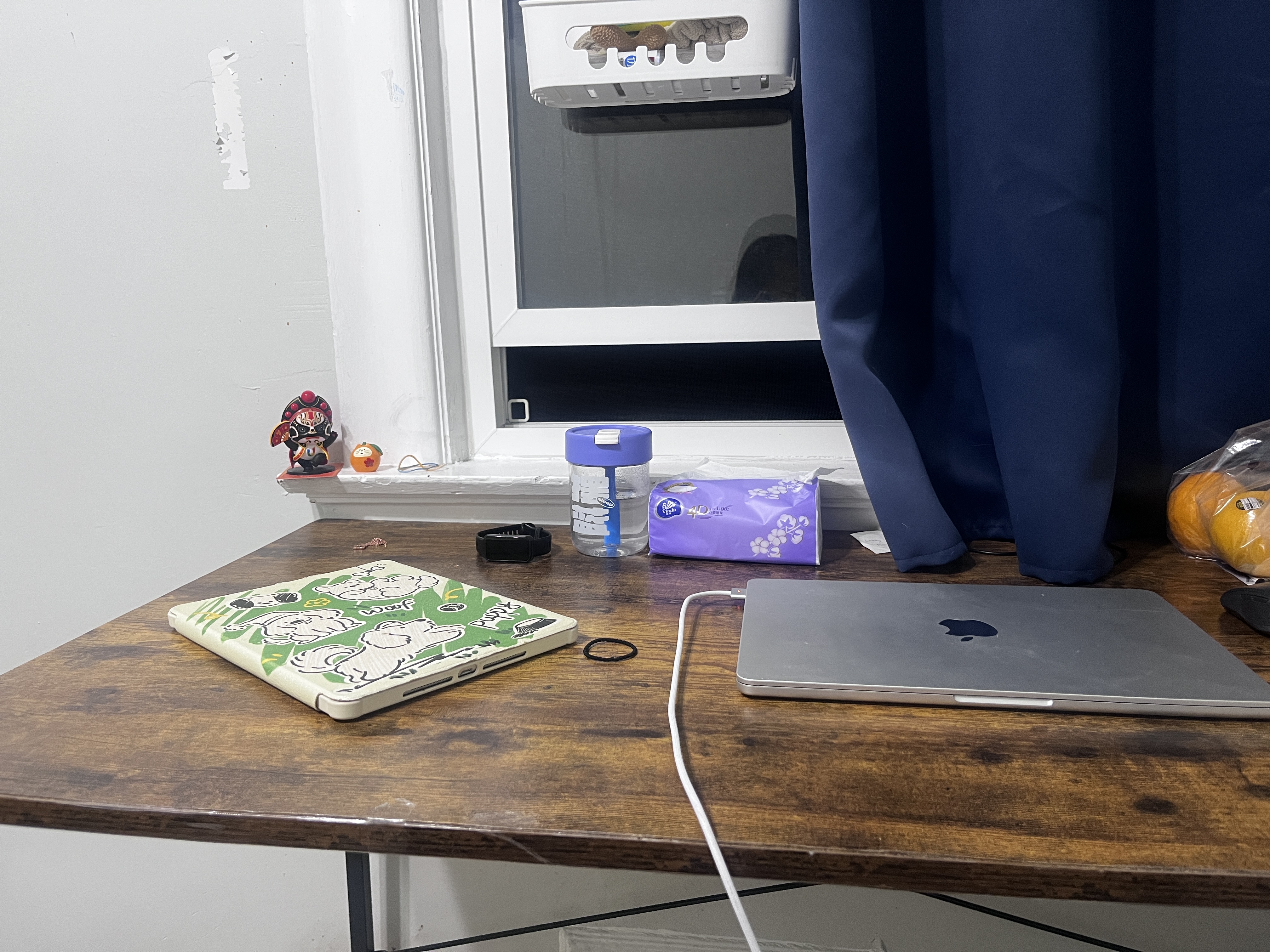
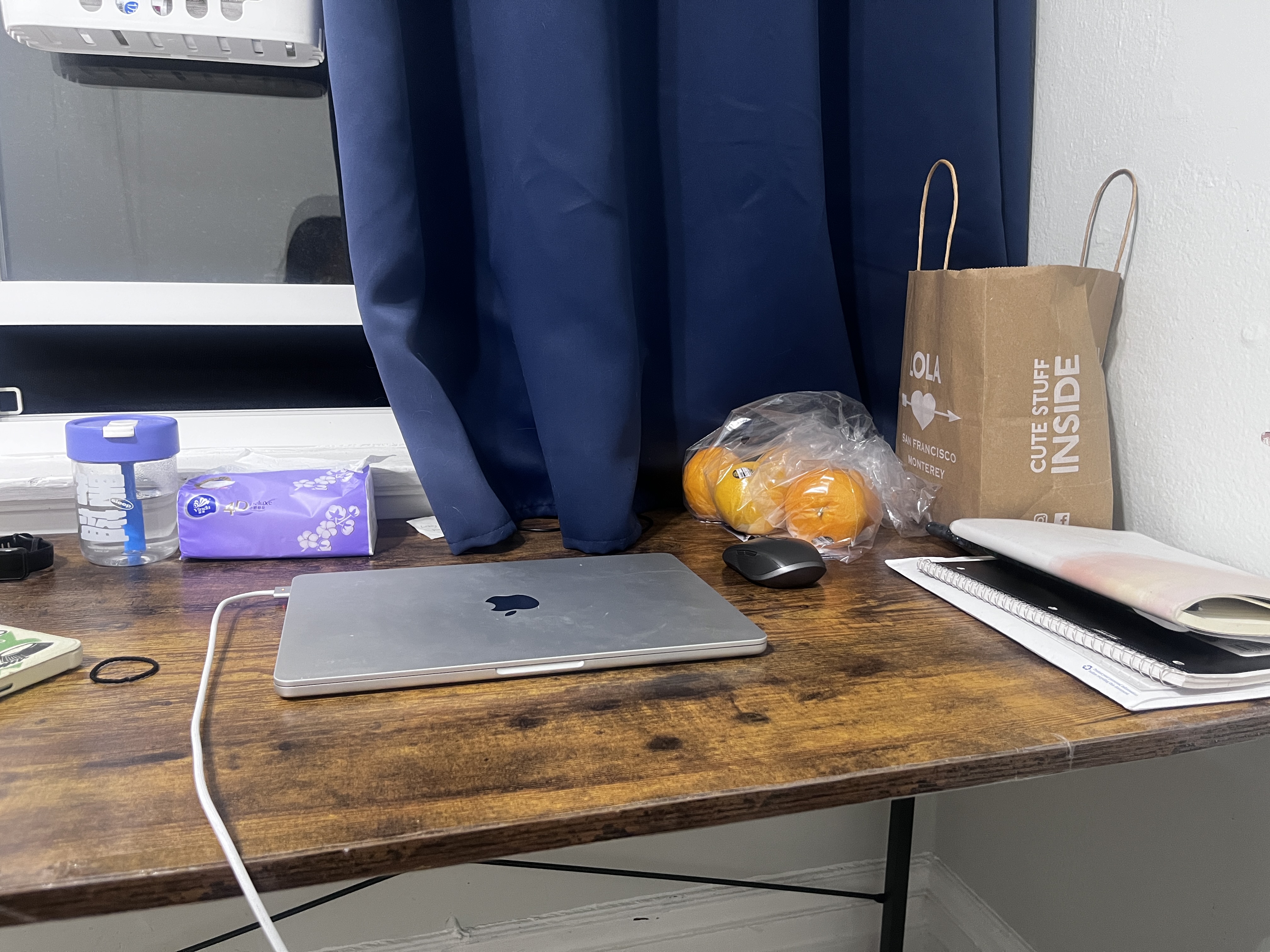
I captured multiple photographs with overlapping views. These images will be used in the later parts for homography estimation, rectification, and mosaicing.
Set 1 · indoor example
Set 2 · outdoor example





A2 · Recover Homographies
Manual correspondences → DLT & normalized DLT → reprojection errors.
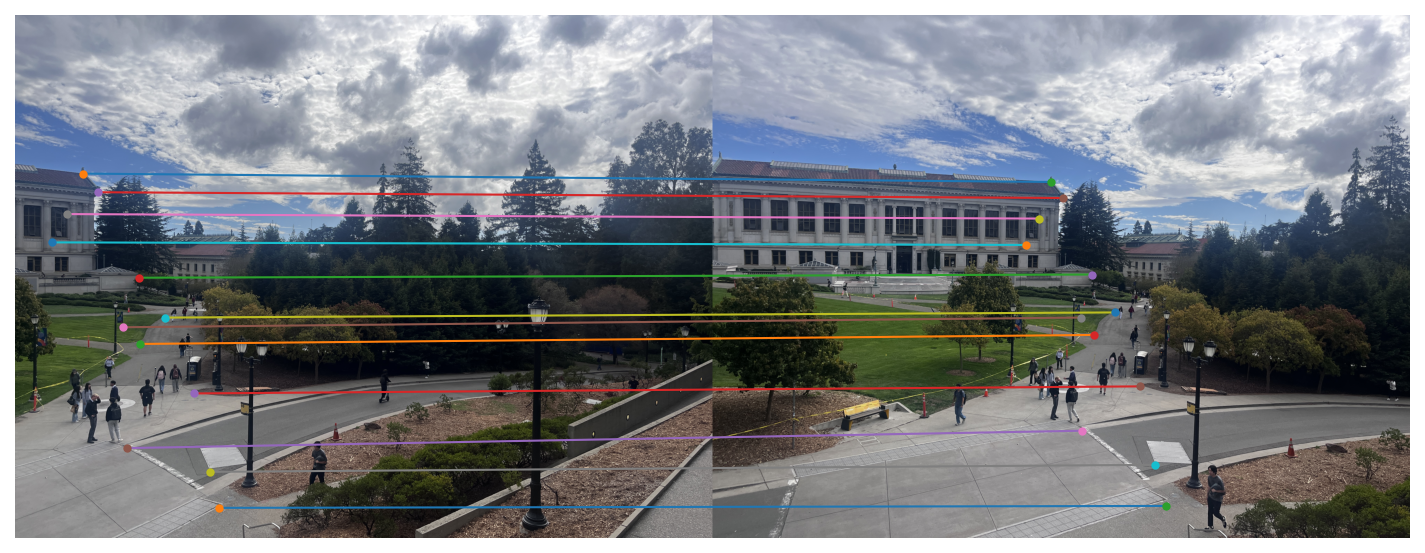
Correspondence Visualization
DLT Linear System
Each correspondence (x,y) → (x′,y′) contributes two rows in the matrix A:
[-x -y -1 0 0 0 x·x′ y·x′ x′]
[ 0 0 0 -x -y -1 x·y′ y·y′ y′]
These stacked rows form a 2N×9 system A·h=0, solved by SVD to obtain the homography vector h.
Recovered Homography H
0.450826 -0.032532 1687.801036
-0.196410 0.802739 252.621928
-0.000130 -0.000011 1.000000
Reprojection Errors
Applying H to im1_pts and comparing against ground truth im2_pts, I measured per-point reprojection errors:
x1,y1 x2,y2 pred_x2,pred_y2 error_px
393.41,916.92 1957.90,965.23 1955.11,970.88 6.30
478.88,1024.69 2024.79,1058.13 2018.84,1059.01 6.01
300.51,1151.04 1887.29,1177.05 1883.50,1178.70 4.14
... (etc) ...
RMSE: 7.3651 px
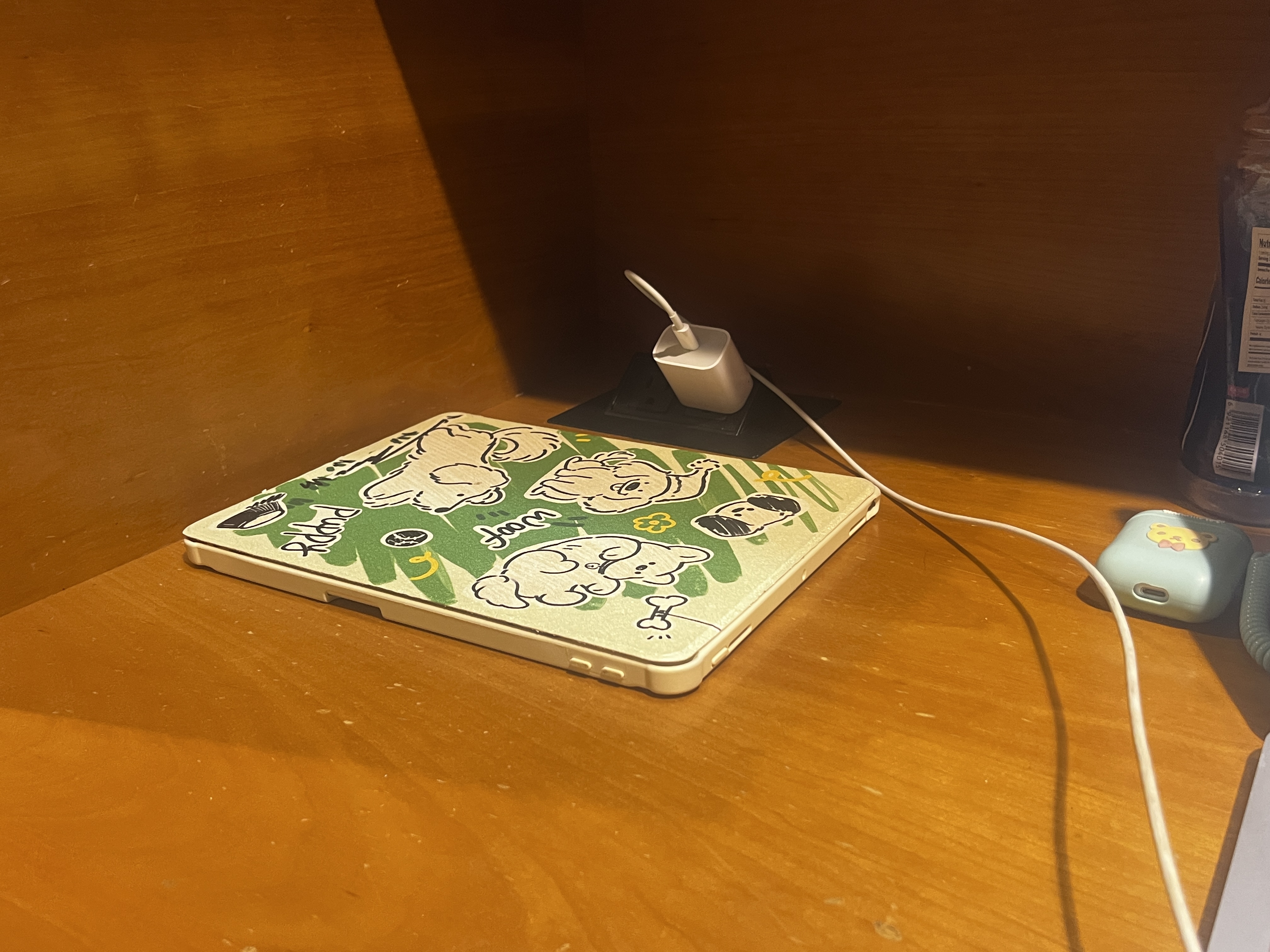
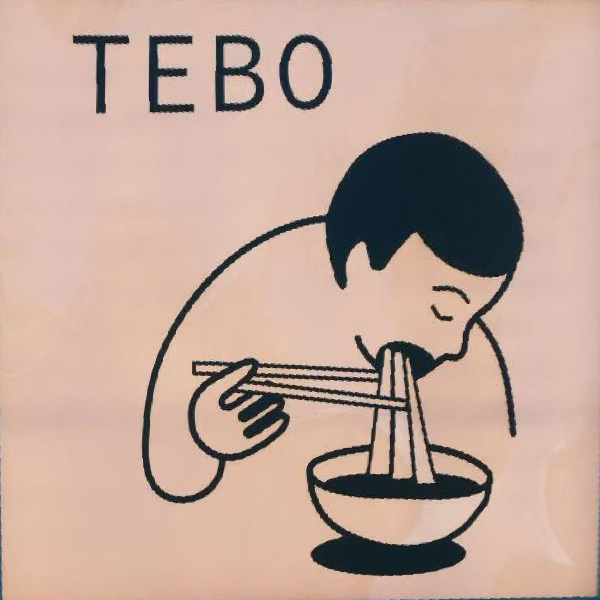
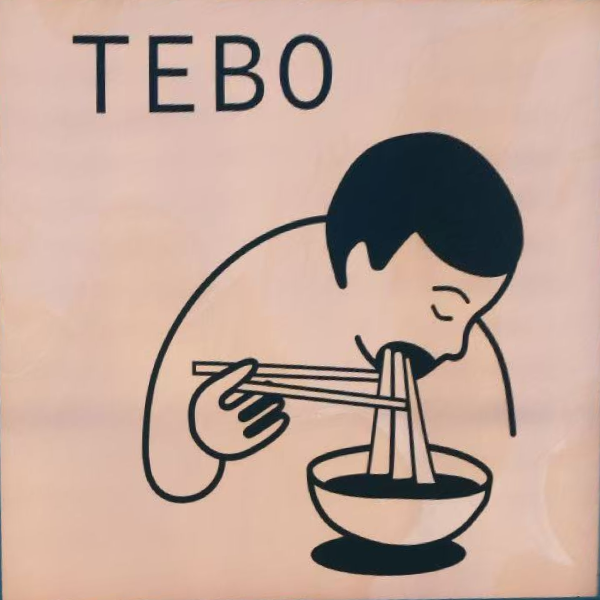
A3 · Warp the Images & Rectification
Inverse warping with NN/Bilinear, rectifying a planar quadrilateral to a canonical rectangle.
Example 1 · iPad Cover Rectification


Example 2 · Poster Rectification

A4 · Blend Images into a Mosaic
Warp each image to a global canvas and feather-blend using soft alpha from EDT.
inv:path.npy (loader will invert).
B · FEATURE MATCHING for AUTOSTITCHING
Following Brown et al. (MSOP, 2005). B.1: Harris + ANMS · B.2: 40→8 descriptors · B.3: Lowe ratio matching · B.4: 4-point RANSAC + mosaics.
B1 · Harris Corner Detection + ANMS
Detect Harris corners (single-scale), then apply Adaptive Non-Maximal Suppression (ANMS) to obtain a spatially uniform subset.

B2 · Feature Descriptor Extraction (40×40 → 8×8)
For each ANMS keypoint, sample a 40×40 gray patch, lightly blur, downsample to 8×8, then bias/gain normalize (z-score). Descriptors are stored as 64-D row vectors (N×64).

B3 · Feature Matching (Lowe Ratio Test)
Compute pairwise distances in descriptor space. For each feature in image A, accept match to image B if d1/d2 < ρ (ρ≈0.7), optionally with mutual check.

B4 · 4-point RANSAC for Robust Homography + Mosaics
Estimate H (img2 → img1) via 4-point RANSAC with normalized DLT and reprojection error thresholding. Re-fit H on inliers, then warp & feather-blend to get panoramas.
Green lines show all inlier correspondences under the best homography, while red lines highlight the 4-point sample that generated this best model.

Manual vs Automatic (Side-by-side)